Past Projects
Parkour Cars
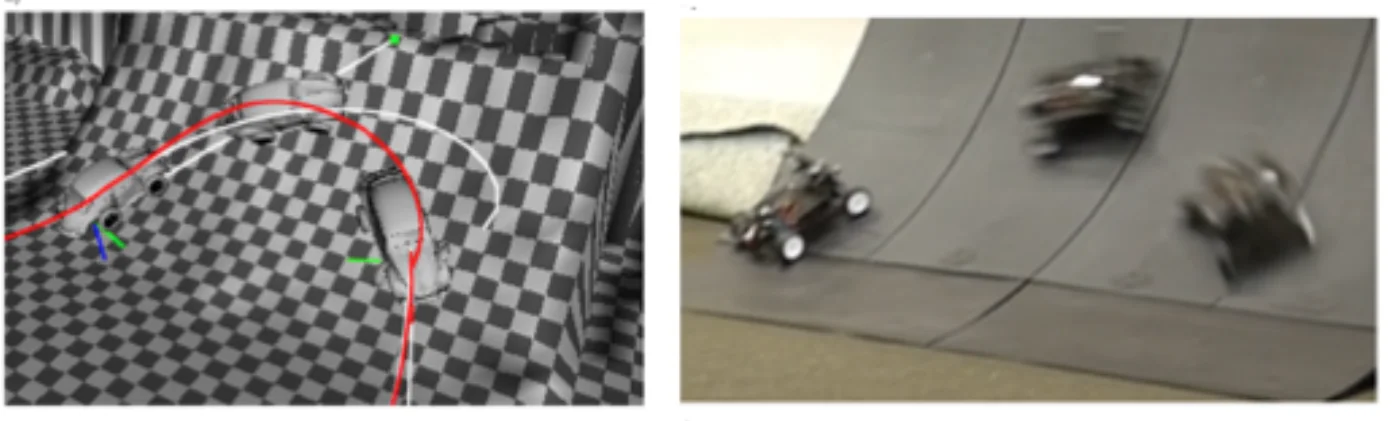
2012–2016The Parkour Cars project aims to develop high fidelity real-time systems for perception, planning and control of agile vehicles in challenging terrain including jumps and loop-the-loops. My research was focused on the local planning and control problem. Due to the difficulty of the maneuvers, the planning and control systems must consider the underlying physical model of the vehicle and terrain. This style of simulation-in-the-loop planning enables very accurate prediction and correction of the vehicle state, as well as the ability to learn precise attributes of the underlying physical model.
Experimental Setup
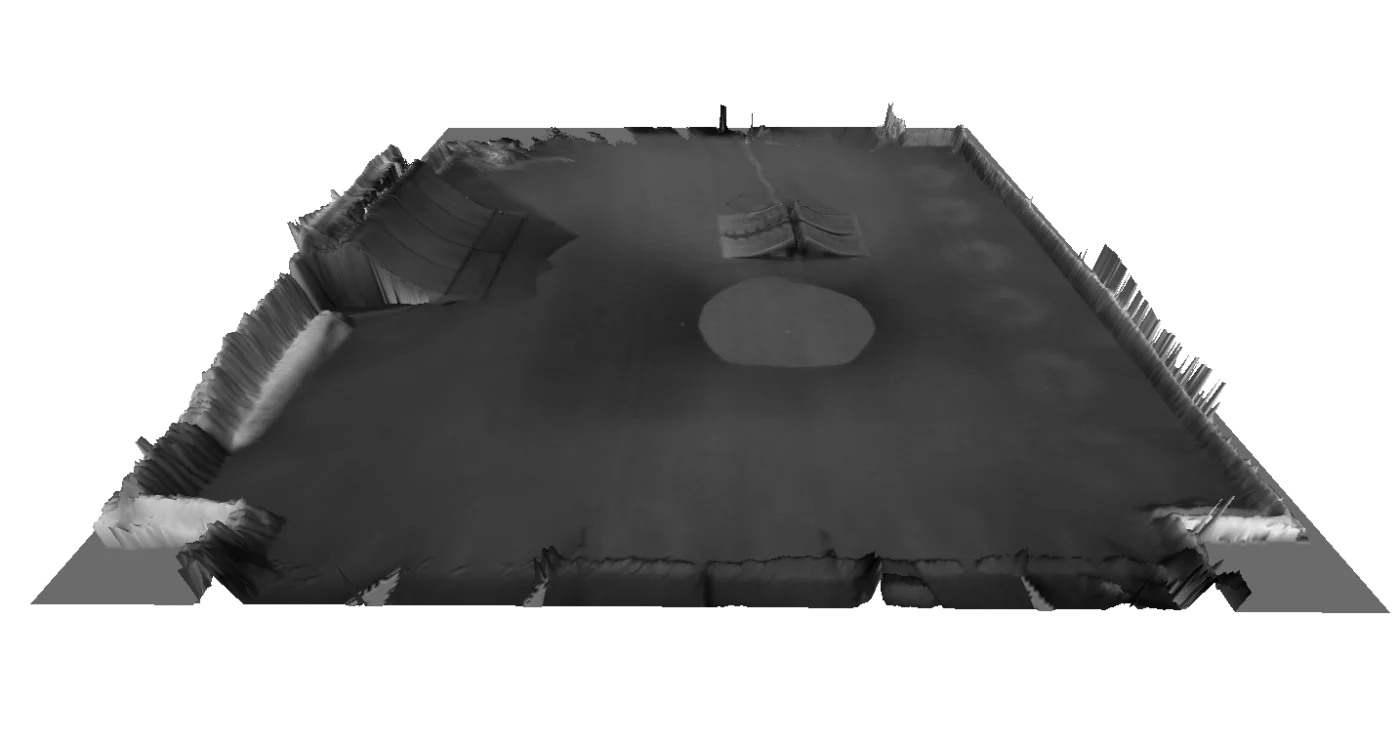
3D model of the laboratory with jumps and a quarter-pipe ramp
The planning and control system is examined in a motion capture laboratory with numerous ramps and jumps. To facilitate the accurate physical simulation, the laboratory and ramp surfaces are scanned using a RGB-D fusion system to provide holistic 3D meshes for use in physical simulation.
The test vehicle orientation is captured using the motion capture system and subsequently fused in a sliding window filter with IMU measurements obtained from the vehicle to obtain a high-fidelity pose estimate which is used in the planner. This fusion system serves to complement the motion capture state estimate with high speed IMU measurements as well as provide temporary state predictions if the vehicle moves outside of motion-capture coverage.
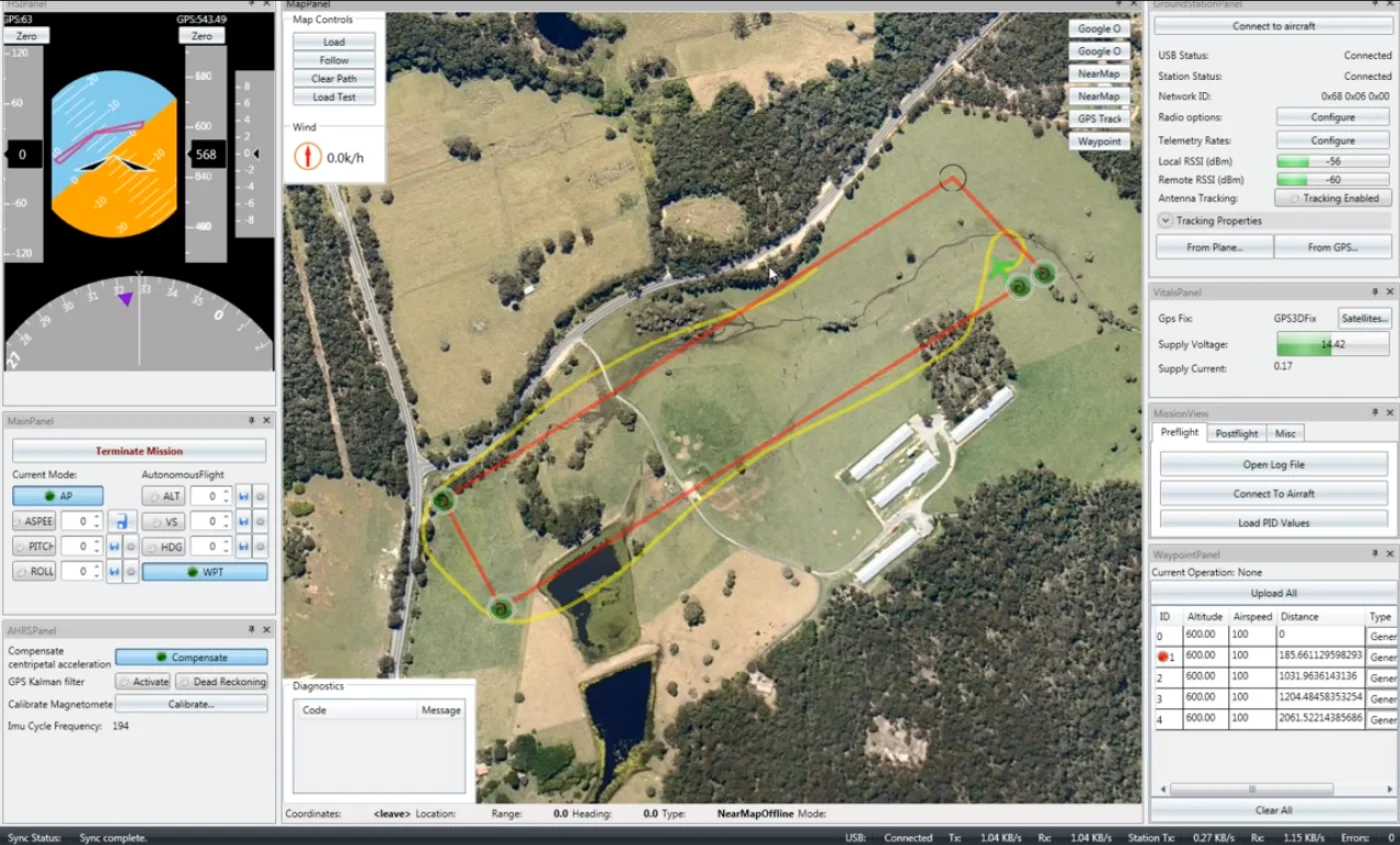
Project Andromeda
2009–2011Prior to commencing my research at the University of Colorado, Boulder, I worked on autonomous aerial vehicles for search & rescue operations. My work was undertaken as part of Project Andromeda, which I started during my undergraduate studies. I led a team of 3 engineers during the development of the project which culminated in successfully achieving autonomous flight on a custom designed composite airframe and bespoke autopilot and inertial navigation system.