Research
During my PhD, I was a member of the Autonomous Robotics and Perception Laboratory at the University of Colorado, Boulder where I undertook research in perception, planning and control for agile autonomous vehicles under the direction of Dr. Gabe Sibley.
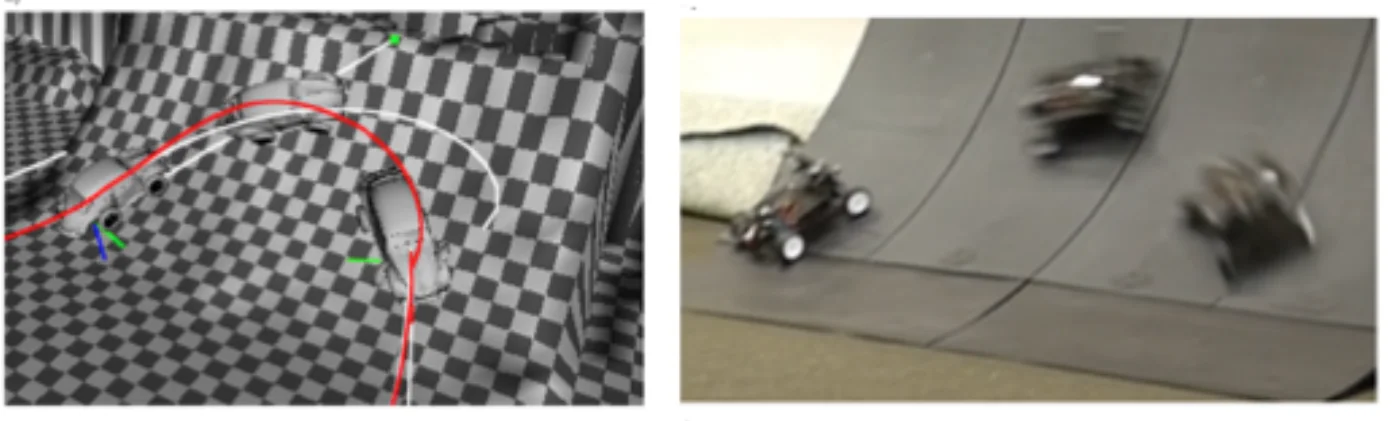
The focus of my PhD research was perception, planning, and control for the Parkour Cars project. The project aimed at developing novel high speed perception, planning and control methods to autonomously enable high-speed and agile maneuvers including jumps, loop-the-loops and precise high-speed driving for small robots. These conditions required high fidelity perception and control that can handle the 3D setting of the problem as well as run tractably on hardware in real-time.
Publications
Nima Keivan, Steven Lovegrove, and Gabe Sibley
IROS 2012 Workshop on Robot Motion Planning: Online, Reactive, and in Real-time
Nima Keivan and Gabe Sibley
In Proceedings of Towards Autonomous Robotic Systems (TAROS) 2013 — Best Student Paper
Nima Keivan, Alonso Patron-Perez, and Gabe Sibley
In Proceedings of the International Symposium on Experimental Robotics (ISER) 2014
Nima Keivan and Gabe Sibley
In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO) 2014
Nima Keivan and Gabe Sibley
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2015
Nima Keivan and Gabe Sibley
The International Journal of Robotics Research (IJRR) 34(13):1573–1589, 2015
Nima Keivan and Gabe Sibley
RSS 2015 Workshop on Robot Simulation